بررسی موردی نقشه برداری هوایی: فتوگرامتری با پهپاد microdrones md4-1000
چطور می تواند انجام شود؟
به طور خلاصه، هر کاری که به وسیله فتوگرامتری کلاسیک انجام می شود می تواند توسط پهپاد یا UAV مجهز به دوربین انجام شود، محدودیت هایی در بخش هایی از UAV وجود دارد (مانند بیشینه ارتفاع پروازی و عمر باتری) که به روش کار مربوط نمی شود. در عمل ارتفاع پرواز مقیاس را محدود می کند. از طرفی پروژه های کوچک مقیاس می تواند با هزینه کمتر با پرواز هواپیما در ارتفاع بالا و پوشش کلی منطقه با عکس های کمتر نسبت به UAV انجام شود.
از سوی دیگر، UAVها در ارتفاع پایین که هواپیماها اجازه پرواز ندارند کار می کنند، برای مثال: ۸۰ متر. هواپیماهای بدون سرنشین در زمینه تهیه نقشه های توپوگرافی، دقت های خوبی را ارائه می کنند و همچنین برای مناطق شهری، پروژه های روستایی کوچک و بزرگ و یا مکان های صعب العبور ایده آل هستند. پهپادها زمان کوتاهتری برای انجام کارهای نقشه برداری نیاز دارند، در نتیجه جایگزینی مقرون به صرفه هستند.
از چه دوربین هایی می توان استفاده نمود؟
دوربین با لنز قابل تعویض ارجح می باشد، به شرطی که از لنزهای فیکس (لنزهای با فاصله کانونی ثابت) استفاده شود. اعوجاج های بزرگ دوربین های کامپکت (در مقایسه با دوربین های متریک) مسئله ای نیست. چرا که خطایی است که ثابت باقی می ماند و می تواند کالیبره و به صورت تحلیلی با نرم افزار حذف شود. دقت زیرپیکسل با تصحیح اعوجاج به دست می آید. فراموش نشود که دوربین های غیر متریک باید برای اهداف فتوگرامتری کالیبره شوند.
 Sony NEX-7 دوربین DSLR غیرمتریک با لنز قابل تعویض
Sony NEX-7 دوربین DSLR غیرمتریک با لنز قابل تعویض
روند کار
مراحل کار به مانند فتوگرامتری کلاسیک است. دقت مورد نیاز اهمیت بالایی دارد. این پارامتر تعیین کننده اندازه پیکسل زمینی است. از طرف دیگر پیکسل سایز ارتفاع پرواز را مشخص می کند، طبق رابطه H=sz*f که در آن sz اندازه پیکسل زمینی و f فاصله کانونی است. ارتفاع پرواز کمتر از مقدار برآورده شده مجاز است ولی بیشتر از آن خیر.
زمانی که ارتفاع پرواز مشخص شد پرواز به کمک نرم افزارهایی مانند mdCockpit طراحی می شود. همپوشانی در امتداد جهت پرواز و بین خطوط پرواز مجاور برای نمونه ۶۶٪ و ۲۰٪ در نظر گرفته می شود. عکس های گرفته شده، کالیبراسیون دوربین و چند نقطه کنترل برای رسیدن به محصولات مختلف نیاز است.
طراحی پرواز در نرم افزار MdCockpit
نتایج و محصولات
برخی از محصولات یا خروجی های به دست آمده از نقشه برداری به کمک پهپاد عبارتند از:
- عوارض تبدیل شده به نقشه CAD
- DTM که به صورت خودکار تولید می شود
- منحنی های میزان
- عکس های قائم یا اورتوفتو
مثالی از پرواز
منطقه
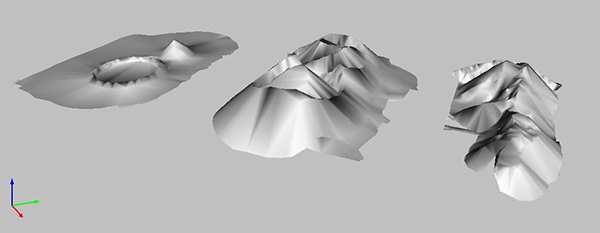
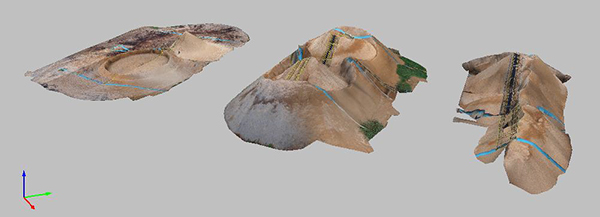
در این کار لازم بود تا مدل سه بعدی سه توده خاک به دست آید. سه روش ممکن باید در نظر گرفته شود:
نقشه برداری کلاسیک: این روش ممکن نیست، چرا که امکان بالارفتن از این توده ها وجود ندارد (شخص ممکن است به داخل فرو برود)، این منطقه غیرقابل دسترس است و نقشه بردار نمی تواند برای مدت زمان طولانی روی آن مستقر باشد.
لیزر اسکنر زمینی: موانع بسیاری نواحی کور را به وجود می آورند، ایستگاه های زیادی نیاز خواهد بود و زمان زیادی برای تکمیل برداشت ها (و همچنین زمان زیادی برای دسترسی به مناطق صعب العبور صرف می شود) و حجم کار را بالا می برد.
فتوگرامتری از ارتفاع پایین به کمک پهپاد: ناحیه ای که باید پوشش داده شود کوچک است و زمان زیادی برای برداشت با پهپاد نیاز ندارد. منطقه را برای مدت زمان کوتاهی به منظور اندازه گیری نقاط کنترل زمینی باید اشغال کرد. کار دفتری هم بسیار سبک است، شامل ترسیم خطوطی که محدوده تپه ای شکل را تعریف می کند. به این ترتیب مدل تشکیل می شود و احجام به کمک ابزارهای نرم افزار محاسبه می شود.

پرواز
برای رسیدن به دقت های مطلوب در این پروژه ارتفاع پرواز ۱۰۰ متری مناسب بود. اندازه پیکسل زمینی ۲/۵ سانتی متر و AP 7/5 سانتی متر.
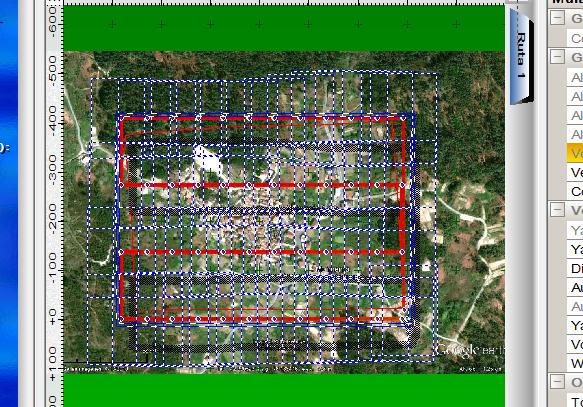
دو نوار برای عکسبرداری ضروری بود و طراحی مسیر پرواز با نرم افزار mdCockpit انجام شد،
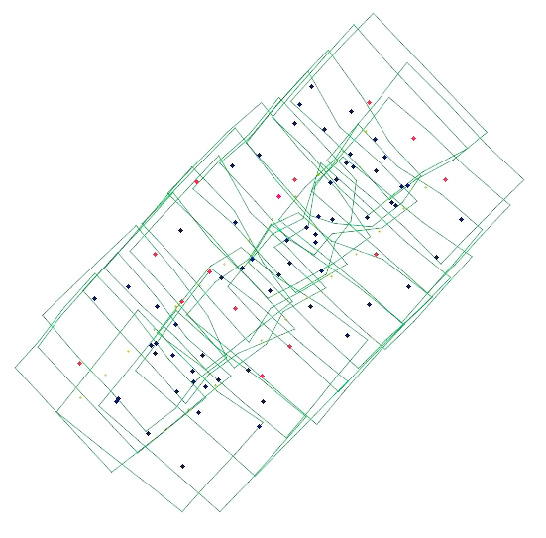
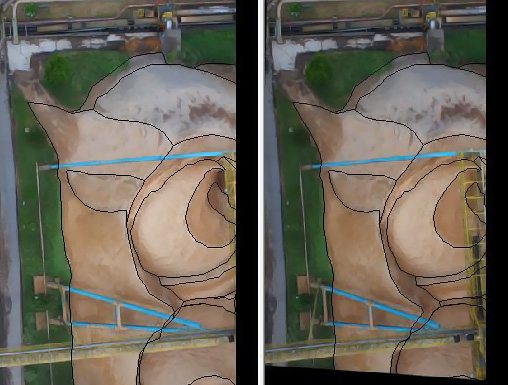
۲۴ عکس تهیه شد. نقاط قرمز نقاط کنترل هستند، این نقاط به همراه نقاط آبی نقاطی هستند که برای محاسبه مثلث بندی هوایی اندازه گیری شده اند. بسیاری از نرم افزارها امکان انتخاب خودکار نقاط و یافتن آن ها در عکس های مختلف را پشتیبانی می کنند. در این کار به خاطر ویژگی های عارضه پروسه اندازه گیریِ خودکارِ نقاط اشتباهات زیادی را به وجود می آورد، بنابراین اندازه گیریِ دستیِ نقاط ترجیح داده شد.
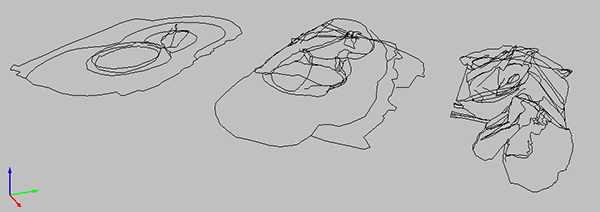
ساخت مدل سه بعدی
خطوط معرف مدل برای هر کدام از سه توده رسم شده اند. پروسه ی ترسیم عوارض ار روی عکس “تبدیل” نام دارد. در هر زمان عامل روی یک زوج عکس کار می کند، چرا که زوج عکس ترسیم سه بعدی را امکان پذیر می سازد.
در اینجا منظر پرسپکتیوی از خطوط و مدل وابسته به آن را مشاهده می کنیم
بر اساس این مدل، احجام مورد نیاز محاسبه شده است. برای چنین کاری به تصویر اورتو نیازی نخواهد بود.
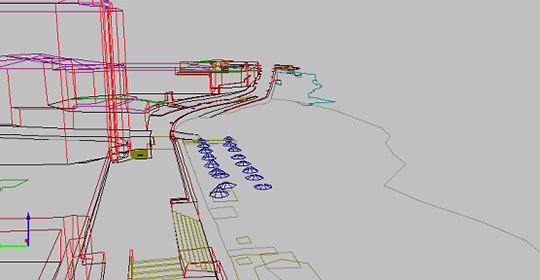
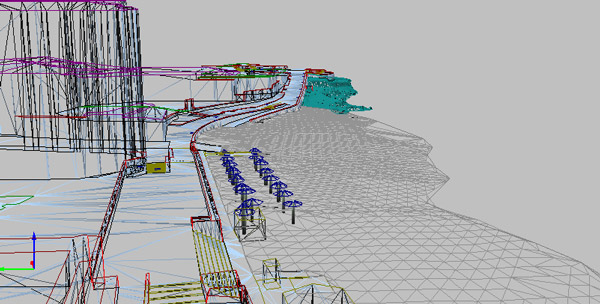
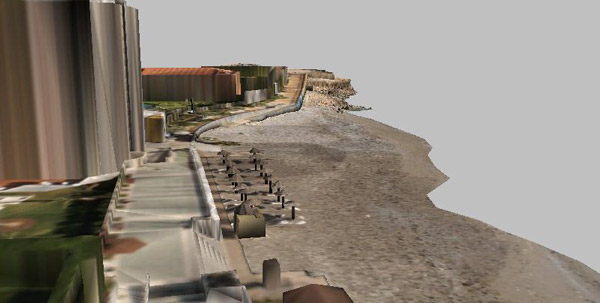
ترکیبی از مناطق شهری و ساحلی
مناطق شهری برای نقشه برداری با سامانه های بدون سرنشین ایده آل است، پرواز با ارتفاع پایین بر فراز خیابان بسیاری از مشکلات کار نقشه برداری زمینی، مزاحمت مردم، عبور و مرور ماشین ها و موانع دید را به همراه ندارد. منطقه شهری مطابق توضیحاتی که در بخش های قبلی داده شد به نقشه تبدیل می شوند: محدوده عوارضی که به وضوح مشخص هستند رسم می شود، عوارضی مانند پیاده رو ها، ساختمان ها، دیوارها، پله ها و … و مدلی بر اساس آن خطوط تشکیل می شود. از سوی دیگر، مناطق خارج از شهر و باز یا در این مثال مناطق ساحلی و صخره ای به کمک نرم افزار به صورت خودکار با همپوشانی عکس ها مدل می شوند. این مدل سازی در قالب شبکه مثلثی در تصاویر زیر قابل تشخیص است. توجه کنید الگوی منظم روی شن های ساحل با همبستگی خودکار با نرم افزار به دست آمده است. به انطباق احجام و جزییات در ترسیم مناطق شهری نیز دقت کنید. هر پله به صورت سه بعدی به نقشه تبدیل شده است و بیش از یک صد پله در منطقه وجود داشته است. فقط تصور کنید که برداشت این همه عارضه به روش نقشه برداری کلاسیک چقدر طول می کشد.
سخت افزارها و نرم افزارهای مورد استفاده
پهپاد microdrones md4-1000
- تحمل بار تا ۱۲۰۰ گرم
- تایم پروازی تا ۸۸ دقیقه
- موتور با نویز کم
- بدنه فیبر کربن مقاوم در برابر آب و هوا
- حالت پروازی اتوماتیک و دستی
دوربین
نرم افزار
- mdCockpit GPS Waypoint
- GIS Software – CARTOUAV
منبع : آپسیس (apsis)
لطفا بر روی آیکن گوگل پلاس (g+1) کلیک نمایید و ما را در گوگل محبوب کنید .

![]()
:: برچسبها:
بررسی ,
موردی ,
نقشه ,
برداری ,
هوایی ,
فتوگرامتری ,
با ,
پهپاد ,
microdrones ,
md4 ,
1000 ,
آپسیس ,
apsis ,
مهندس ,
میرزاعلی ,
مدرسه آپسیس ,
photogrammetry ,
,
:: بازدید از این مطلب : 5200
|
امتیاز مطلب : 139144
|
تعداد امتیازدهندگان : 42
|
مجموع امتیاز : 42